TIIPS Outperforms Across the Board
TIIPS consistently outperforms both the inductive baseline and ExeDec across DeepCoder and LambdaBeam, in all five compositional generalisation categories. All TIIPS vs. ExeDec differences are statistically significant (paired t-test, p < 0.05). In RobustFill — a single-trace domain with structurally fixed decomposition order — TIIPS and ExeDec converge, exactly as the cooperative framework predicts.
The Cooperative Dividend
TIIPS solves a substantial set of tasks that are unreachable by either baseline individually or in combination — ruling out both the ensemble and prefix-of-ExeDec explanations. The Venn diagrams below show the overlap of solved tasks (DeepCoder left, LambdaBeam right).
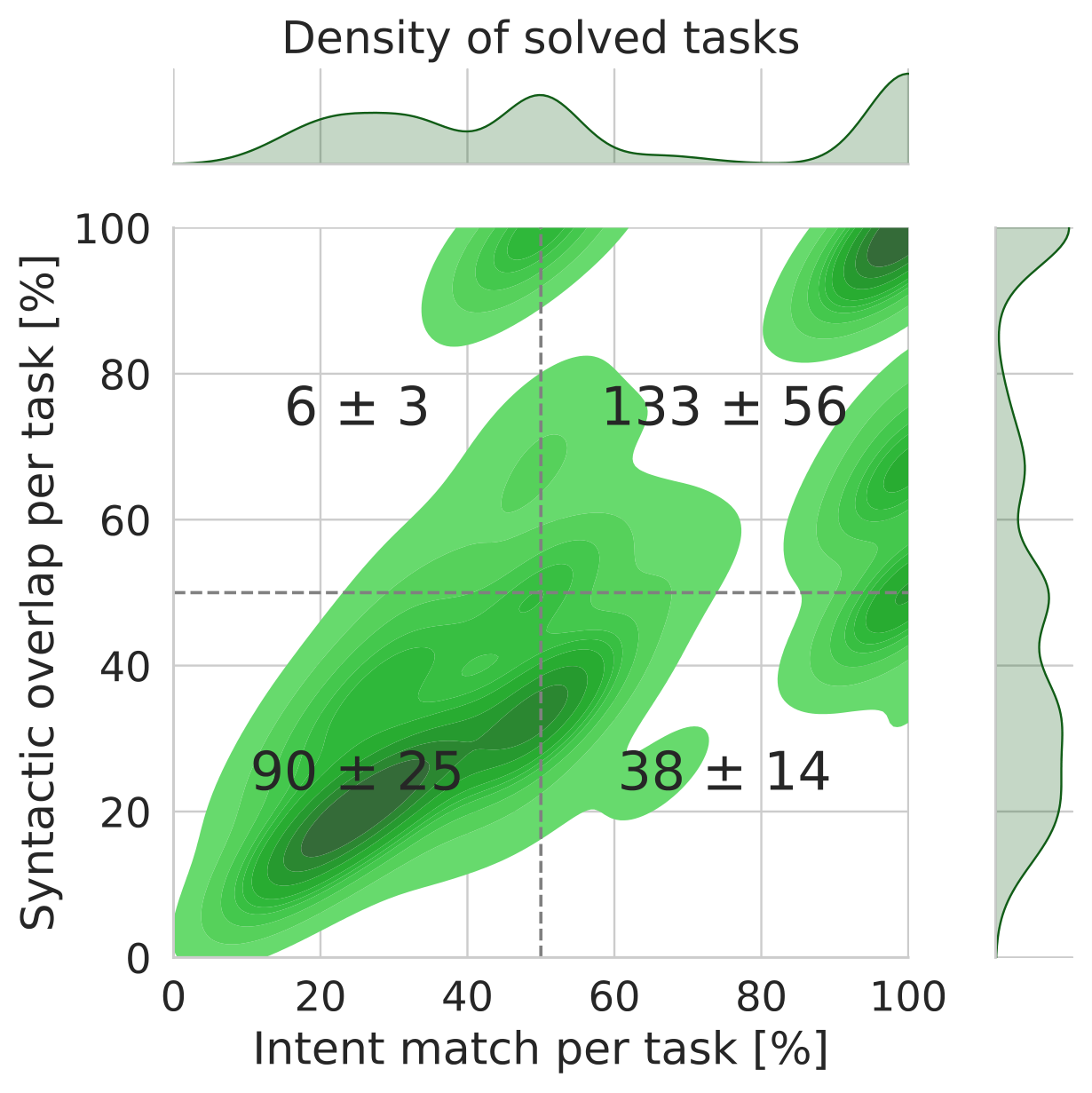
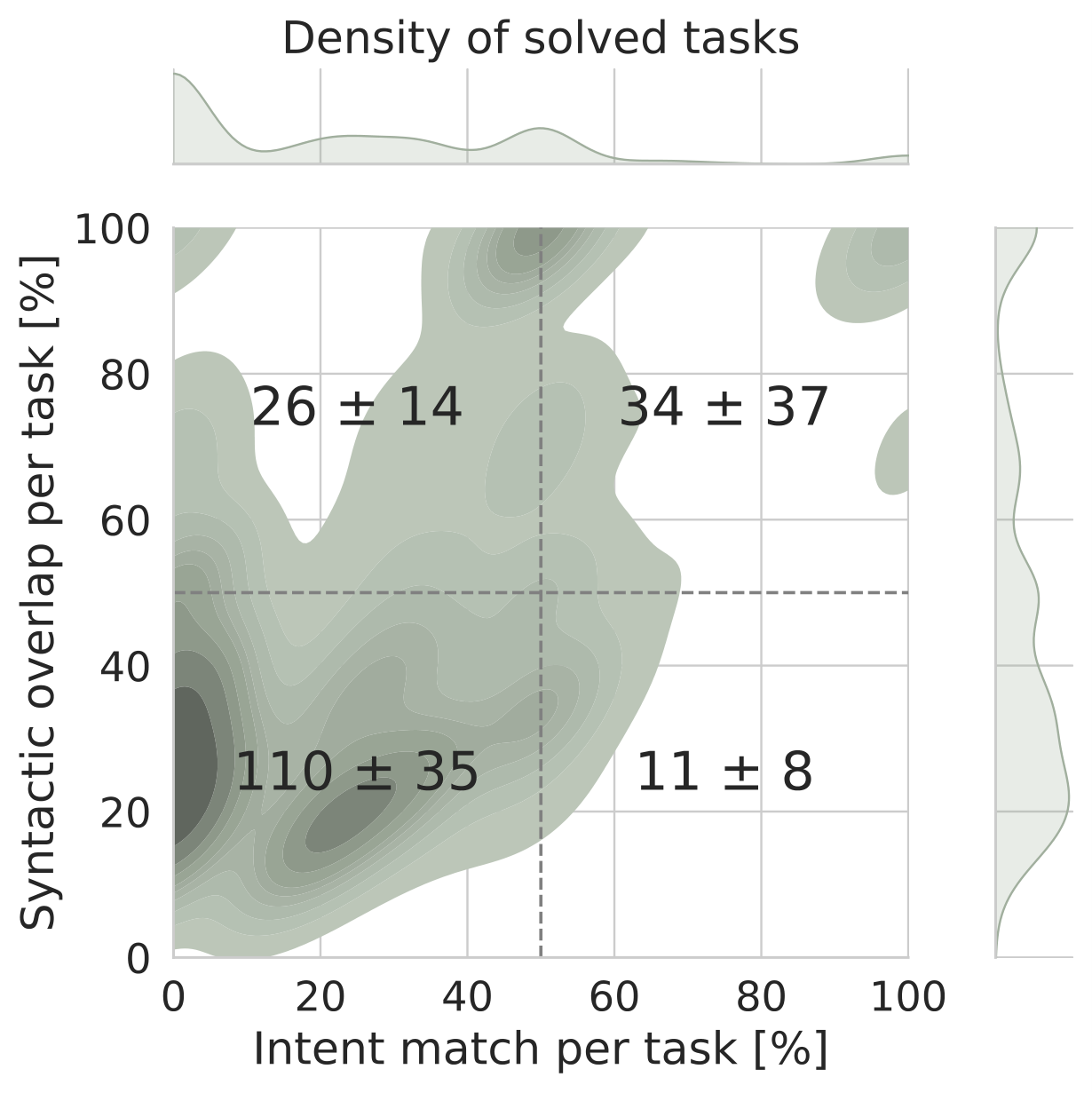
Robustness: Intent Match & Syntactic Overlap
Beyond accuracy, TIIPS solutions concentrate in the high intent match / high syntactic overlap quadrant — matching the intended program behavior, not just the training examples. ExeDec solutions spread across lower quadrants: a fingerprint of the subordination failure mode, where a slightly off-target transductive prediction forces the synthesizer to produce convoluted programs that satisfy the examples but deviate from the canonical transformation.